
こんにちは、マイクです。
先週末の米国雇用統計は、市場予想を若干上回る結果でした。
これで今月の利上げは完全に織り込まれたと考えられます。
既に市場の関心は、来年の利上げペースがどうなるかに移っているようですね。
さて、MAの話も早いもので10回目となりました。
■知っているようで知らないMAの話(1:SMAとEMAの違い)
■知っているようで知らないMAの話(2:EMAの「期間」って何?)
■知っているようで知らないMAの話(3:SMAとEMAの重みの関係は?)
■知っているようで知らないMAの話(4:EMAの実際の計算方法)
■知っているようで知らないMAの話(5:EMAの角度とローソク足の位置との関係)
■知っているようで知らないMAの話(6:正弦波状の値動きに対するSMAとEMA)
■知っているようで知らないMAの話(7:急変した値動きに対するSMAとEMA)
■知っているようで知らないMAの話(8:デジタルフィルタとしての移動平均)
■知っているようで知らないMAの話(9:SMAの周波数特性)
そして、タイトルにもあるように、この記事は実は猫カフェで書いています。
かわいいニャンコ達がたくさん徘徊していて、めちゃ癒されています。笑
こんなのとか:
カフェラテも猫♪:
うーん、たまらんにゃ![]()
さて、前回の記事では、SMAの周波数特性とそれが表すSMAの特徴について見てきました。
今回はEMAの周波数特性を見てみましょう。
その前に・・・
前回のクイズの答は考えましたか?
- デジタルフィルタにはFIRとIIRの2種類があると言いましたが、EMAはどちらになるでしょうか?
というものでした。
勘のいい方は第2回で示したEMAの定義式を思い出したかもしれませんね:
\[\mathrm{EMA}(t)=\alpha\sum_{j=0}^{\infty}(1-\alpha)^j p(t-j)\tag{1}\]
ここで平均を取る項が無限大(\(\infty\))までになっていることに気付けば、EMAがIIRフィルタであることがわかったかと思います。
では、具体的にフィルタの多項式\(A\), \(B\)はどうなっているのでしょうか?
それは、第4回で示したEMAの計算方法からわかります:
\[\mathrm{EMA}(t)=\alpha p(t)+(1-\alpha)\mathrm{EMA}(t-1)\tag{2}\]
これを、第8回で示したデジタルフィルタの入出力関係
\[A(z)y(t)=B(z)u(t)\tag{3}\]
に従って表すと、
\[(1-(1-\alpha)z^{-1})y(t)=\alpha u(t)\tag{4}\]
と書けるので、結局、
\[A(z)=1-(1-\alpha)z^{-1}\tag{5}\]
\[B(z)=\alpha\tag{6}\]
であることがわかります。
よって、伝達関数は
\[H(z)=\frac{B(z)}{A(z)}=\frac{\alpha}{1-(1-\alpha)z^{-1}}\tag{7}\]
となります。
これに
\[z=e^{i\omega}\tag{8}\]
を代入すると、
\[H(\omega)=\frac{\alpha}{1-(1-\alpha)e^{-i\omega}}\tag{9}\]
という周波数特性が得られました!
EMAの期間が20の場合について図示するとこうなります: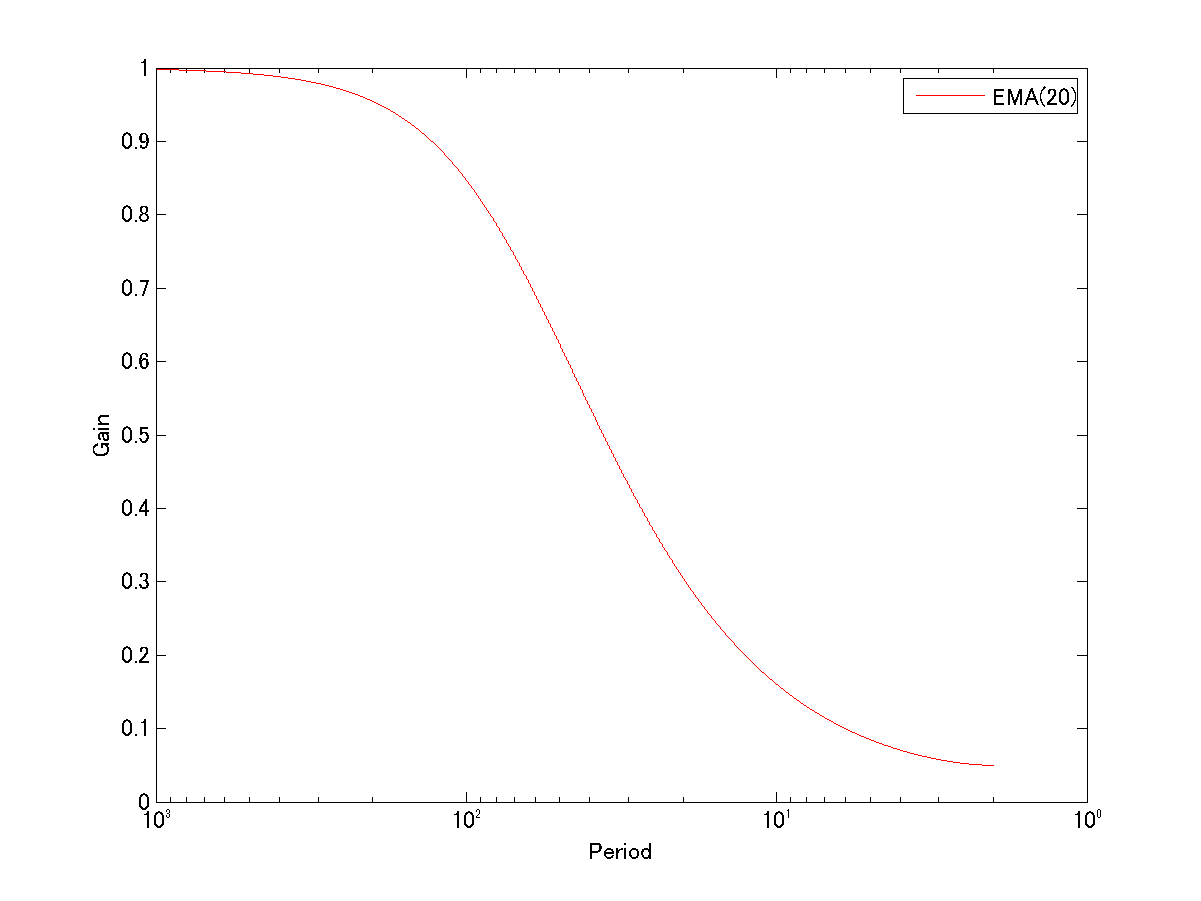
SMAと一緒に表示すると: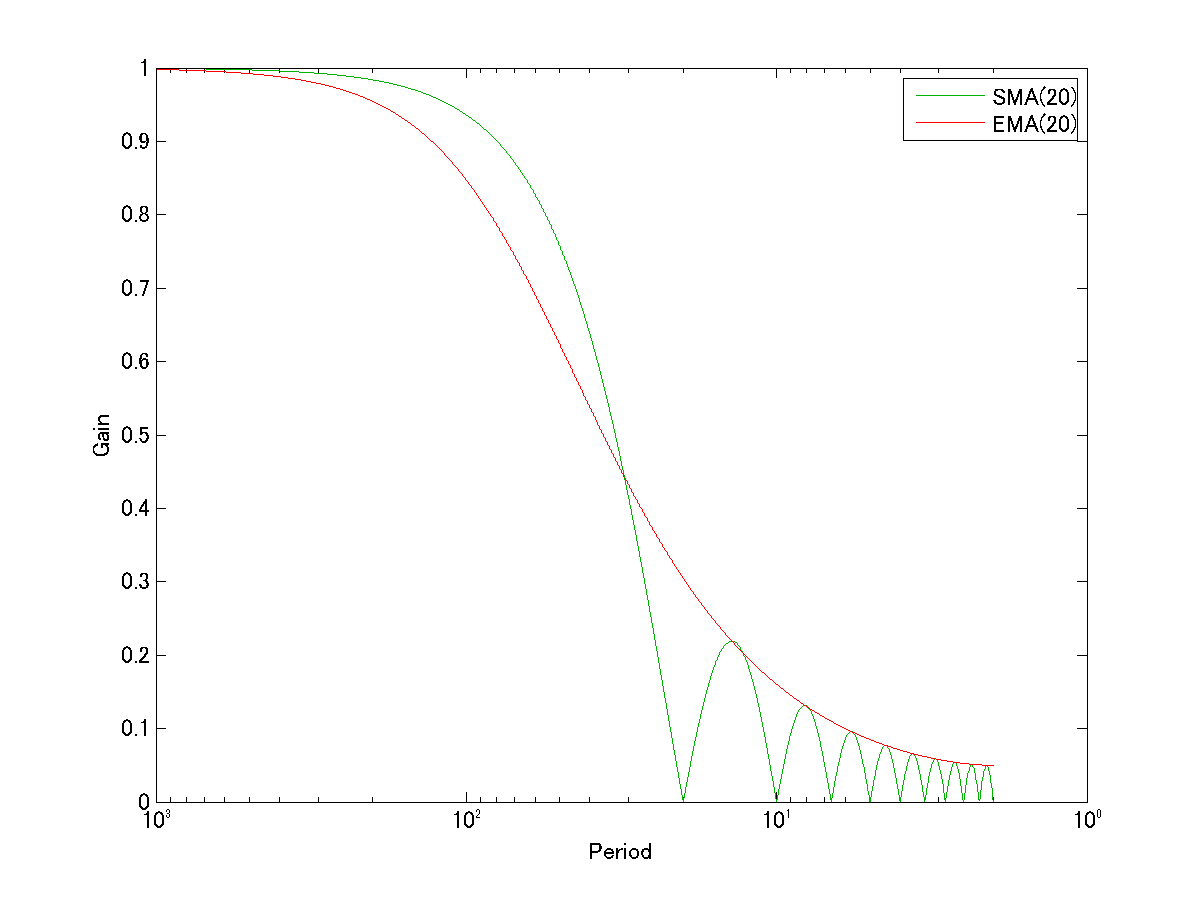
となります。
この図が示すEMAの特徴については、また次回にしましょう♪
では、今日もポチっと応援お願いします☆
↓↓↓↓↓↓ ![]()